










 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
A lo largo de los siglos la forma de aprovechar la energía del viento ha evolucionado, pasando por varios cambios hasta llegar a la actualidad donde se considera una de las formas de energía alternativa y limpia que se encuentra en mayor auge (WEC, 2018), con índices de crecimiento altos. Según análisis realizados por Hernández et Al. (Hernández Galvez, Pampillon Gonzalez, & Hernández Almenares, 2018), su utilización no produce impactos ambientales significativos y depende de una fuente de energía inagotable: el viento.
El crecimiento en cuanto a desarrollo y tecnología con respecto a aerogeneradores ha sido exponencial en los últimos años (WEC, 2018), (IRENA, 2020), pero, aunque haya sido considerable el crecimiento, siguen existiendo diversos retos en el campo, como aumentar el rendimiento en la producción y así reducir costos, definir formas de protección para disminuir estrés estructural en las instalaciones, aumentar el tiempo de vida útil que se puede obtener sin arriesgar la funcionalidad. Estos retos se pueden hacer frente mediante el análisis, desarrollo e innovación en los sistemas aerodinámicos de los aerogeneradores, la implementación de equipos de electrónica de potencia cada vez más modernos y sofisticados, y las mejoras en cuanto a lo estructural de las instalaciones.
El avance en análisis, innovación y desarrollo son puntos necesarios a considerar debido a que el funcionamiento de los aerogeneradores es dependiente única y absolutamente del viento, que dependiendo de la zona geográfica tiende a un comportamiento especifico (Márquez Torres, 2013). Las condiciones meteorológicas en ocasiones pueden ser pronosticadas, pero no controladas, por lo que un aerogenerador debe adaptarse a las condiciones en las que se encuentra para obtener el máximo rendimiento de la turbina eólica y un buen aprovechamiento del viento, o bien realizar maniobras de protección en el caso de que las condiciones meteorológicas impliquen un riesgo para las instalaciones.
El trabajo realizado tendrá aportaciones al desarrollo y la optimización en el aprovechamiento de la energía eólica y su conversión en energía eléctrica, mediante el desarrollo de un sistema de control robusto y dinámico acorde a las necesidades presentes en un sistema eólico-eléctrico.
En el presente trabajo se realiza la investigación y el diseño de un sistema de control del ángulo de paso (también llamado ángulo pitch) para un aerogenerador de paso variable, modificando así el perfil aerodinámico que poseen las aspas, como método para aumentar el aprovechamiento de la energía contenida en el viento, manteniendo lo más estable posible la potencia nominal del aerogenerador una vez superada la velocidad cut-in, aprovechando también velocidades relativamente bajas de viento, también se utiliza como método de protección en caso de que las velocidades de viento superen las velocidades consideradas seguras para las instalaciones, sometiendo así al rotor a un estado de frenado de emergencia. La investigación está orientada a turbinas eólicas HAWT en general, es decir, aerogeneradores de eje horizontal, de tres aspas, dispuestas a 120° entre sí.
Para el desarrollo del proyecto se tienen en cuenta los modelos teóricos de las principales secciones de un aerogenerador: la aerodinámica, mecánica, de generación y en este caso, la del control del ángulo de palas, también se tiene en cuenta un modelo de aproximación del viento. El sistema a utilizar es un control Proporcional-Integral adaptativo mediante lógica difusa, es decir, no posee ganancias estáticas, las ganancias son valores variables adaptados al comportamiento del sistema en el momento mediante un control difuso. La ventaja de un control adaptativo es que tiene un comportamiento dinámico frente a otros sistemas con ganancias fijas y puede adaptarse según lo que se requiera en el momento, obteniendo así una mejor respuesta ante cambios y perturbaciones a la planta (Cerecero Natale, Ramos Fernandez, Marquez Vera, & Campos Mercado, 2016); (Al-Mola, Abdullah, & Muhaimin, 2013).
Estos modelos son implementados y posteriormente ensamblados en un modelo general, utilizando el software Matlab Simulink, como herramienta de cómputo y simulación para analizar el comportamiento del aerogenerador bajo diferentes condiciones y la reacción del sistema de control empleado.
MATERIALES Y MÉTODOS
El método que se utilizó para la ejecución de esta investigación es la de experimentos en laboratorio. El proceso se llevó a cabo haciendo uso de la herramienta simulink del software Matlab, aprovechando el entorno de simulación que provee la herramienta.
Entre las variables se incluyeron la velocidad del viento; el ángulo pitch de las palas; la salida del controlador fuzzy PI, responsable de tener en cuenta en la entrada el error para proporcionar una acción de control que afecta a las ganancias del controlador; y la velocidad de rotación del eje de baja velocidad del aerogenerador.
Debido a las variaciones en las condiciones del viento, la potencia producida por los aerogeneradores puede también ser cambiante, este cambio puede afectar al rendimiento de la instalación a la hora de generar energía eléctrica, los efectos de estas variaciones se pueden aplacar mediante un buen sistema de control. En base a lo analizado se plantea la siguiente hipótesis: La aplicación de un control PI difuso supone una solución a dicho problema, ya que se trata de un sistema realimentado y con ganancias dinámicas que toman valores diferentes en tiempo real según los requerimientos de la planta, para garantizar una buena respuesta ante perturbaciones y ruido.
DESCRIPCIÓN DE LA REALIZACIÓN DEL PROYECTO
El cambio y las variaciones en las condiciones meteorológicas afecta directamente a una turbina eólica, tanto en términos estructurales, así como también en términos de producción de energía eléctrica. Un adecuado sistema de control aerodinámico de velocidad es una forma de aplacar las consecuencias posibles de lo antes visto. Para esto se realizó el análisis correspondiente en cuanto a las instalaciones de una turbina eólica, esto incluye el análisis aerodinámico y de potencia mecánica producida, así también el sistema mecánico que posee, en esta etapa se presentaron varios conflictos en la realización del modelo final del sistema ya que presentaba algunas inconsistencias, dichas dificultades pudieron ser solucionadas y de esta forma al finalizar el ensamble se obtuvo de forma experimental un modelo matemático aproximado de la planta mediante un sistema de primer orden con retardo puro, lo que fue útil a la hora de la sintonización del controlador, para dicha sintonización se utilizó el criterio de Ziegler-Nichols. Posteriormente se diseñó el controlador a ser utilizado, en este caso un controlador adaptativo PI difuso o fuzzy PI, que se desarrolló teniendo en cuenta como referencia los valores de sintonización obtenidos, añadiéndole además un sistema anti wind up para prevenir comportamientos no lineales en el sistema, así finalmente se obtuvo el modelo completo de la planta junto con el sistema de control. Para analizar el comportamiento de la planta con el control fuzzy PI se procedió a llevar a la planta a diferentes regímenes de viento, incluyendo viento con turbulencias, registrando los valores de las variables de forma gráfica para cada caso, a esto se añade la realización de un modelo en 3d a fin de poder complementar la visualización del comportamiento del sistema aplicado a un aerogenerador y a la pala.
DESCRIPCIÓN DE LOS INSTRUMENTOS Y PROCEDIMIENTOS UTILIZADOS PARA LA RECOLECCIÓN Y TRATAMIENTO DE LA INFORMACIÓN.
Entre los métodos empleados para la recolección de datos se incluyen principalmente el archivo de datos recolectados, revisión bibliográfica, análisis de contenido y observación natural, de esta forma se obtuvo información de utilidad para la realización del proyecto, concerniente a modelos matemáticos de turbinas eólicas y a sistemas de control tanto como P, PI y PID clásicos, controles difusos y controles híbridos, así como también a las aplicaciones e implementaciones de dichos controles junto con sus resultados. Añadido a estos instrumentos mencionados se empleó la observación natural, con la finalidad de comprobar el rendimiento del sistema para analizar el cumplimiento de los objetivos planteados, esto haciendo uso de herramientas disponibles en el software Matlab, como lo es el scope, utilizado para obtener de forma gráfica los resultados del comportamiento de la planta bajo diferentes condiciones y la herramienta 3D World Editor y VR Sink, útiles para una asimilación visual de la aplicación del sistema a una planta real.
ADECUACIÓN DE LOS MÉTODOS A LOS OBJETIVOS DE LA INVESTIGACIÓN
Los métodos de revisión bibliográfica, análisis de contenido y archivo de datos fueron de suma importancia, haciendo uso de dichos métodos se pudo aportar al análisis teórico de, primeramente, las instalaciones de un aerogenerador, la aerodinámica y aprovechamiento de energía eólica disponible, la sección mecánica y transmisión, y los controladores. También dichos instrumentos han aportado recursos en cuanto a criterios de sintonización y respuesta de sistemas de control.
El método de observación natural, aportó en la comprobación de funcionamiento y análisis de rendimiento del sistema empleado.
ANÁLISIS E INTERPRETACIÓN DE RESULTADOS
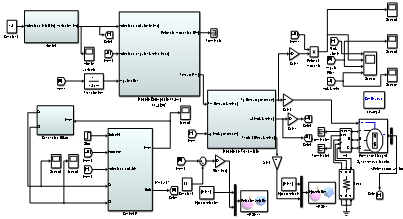
Esquema general del sistema: Se desarrolló un diagrama de bloques basado en la configuración implementada por Al-Mola et al (Al-Mola, Abdullah, & Muhaimin, 2013) (Figura 1). Primeramente, según los valores nominales de funcionamiento de la turbina modelada, se establece el setpoint ideal, seguido a esto se obtiene el error entre el setpoint y la velocidad de rotación, esta señal se dirige al controlad Proporcional-Integral, cuyas ganancias son dinámicas mediante controladores difusos que también poseen como entrada la señal de error. Posterior a esto la señal de control pasa por una sección anti wind-up¬ para contrarrestar las saturaciones que en determinados momentos son producto del controlador, con el fin de evitar no linealidades en el sistema. El valor de salida del controlador (valor del ángulo pitch o ) va directamente al bloque de la turbina eólica para de este modo influir directamente en la velocidad de rotación. Los resultados del comportamiento se almacenaron en la herramienta Scope, que facilitó la visualización de valores a través del tiempo en formato gráfica y en la herramienta display.
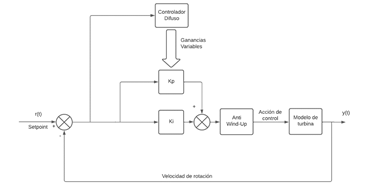
Figura 1. Diagrama de bloques implementado; configuración implementada por Al-Mola et al (Al-Mola, Abdullah, & Muhaimin, 2013).
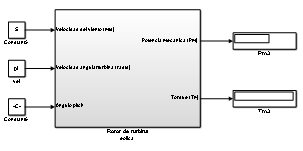
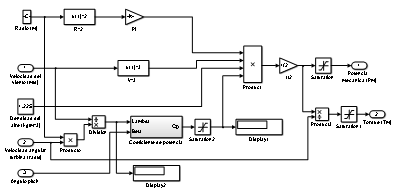
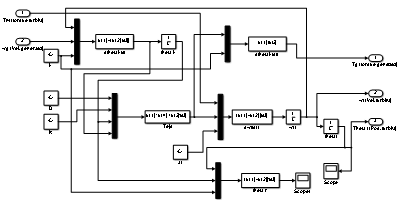
Bloque del rotor del aerogenerador: El rotor contiene los componentes principales encargados de aprovechar la energía del viento y convertirla en energía mecánica, en este se encuentran las palas y el eje de baja velocidad. Teniendo en cuenta las Ecuaciones (1); (2); (3), se ensambló el modelo mecánico de la turbina eólica en Simulink, quedando de la forma en la que se aprecia en la Figura 2. En la Figura 3 se observan los bloques contenidos dentro del subsistema “Rotor de turbina eólica”.
 (1)
(1)
 (2)
(2)
 (3)
(3)
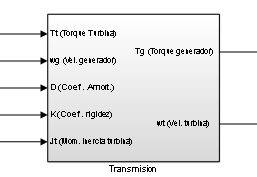
Bloque del acoplamiento mecánico: Con el fin de obtener un comportamiento similar a implementaciones físicas, se desarrolló el bloque del acoplamiento mecánico. Una de las magnitudes más significativas del bloque es el momento de inercia del rotor, ya que influyó en el ensamble final del modelo del aerogenerador otorgando una respuesta transitoria sobre-amortiguada/críticamente-amortiguada y no ideal con respuesta instantánea ante el escalón, esto contribuyó a realizar un análisis más aproximado de cómo sería la implementación en una planta física. Teniendo en cuenta las Ecuaciones (4); (5); (6); (7), se realizó el bloque de acoplamiento mecánico entre el eje de baja velocidad y el eje de alta velocidad. En la Figura 4 se observa el bloque y en la Figura 5 se observan los bloques contenidos dentro del subsistema.
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
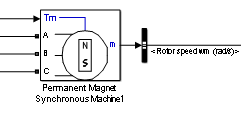
Bloque del aerogenerador: Para el generador se utilizó un bloque de máquina síncrona de imanes permanentes disponible en simulink (Figura 6). Para obtener la medición de la velocidad de rotación de la misma se utilizó un Bus selector.
Desarrollo del control difuso: Para el desarrollo de los controladores difusos encargados de variar las ganancias proporcional e integral se utilizó la herramienta Fuzzy Logic Designer disponible en el software Matlab, la cual brinda las herramientas necesarias para llevar a cabo el diseño de un controlador difuso. En la herramienta es posible seleccionar las funciones de membresía que se desean utilizar, establecer el universo de discurso, programar las reglas lingüísticas e incluso tener acceso a una ventana interactiva en donde es posible variar los valores de entrada para así visualizar el proceso producto del método de inferencia para dar una salida, genera además las gráficas de la curva de control del controlador. El método de inferencia utilizado en los controladores difusos para la ejecución es el de Mamdani con defusificación mediante método del centroide.
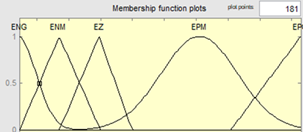
Las funciones de membresía utilizadas fueron en su mayoría triangulares, aunque también se incluyeron funciones de tipo campana de Gauss. Dichas funciones, junto con el universo de discurso y las reglas de inferencia no dependen de ningún criterio para su diseño, quedan a decisión del diseñador del controlador.
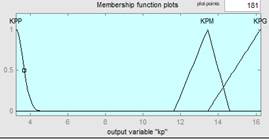
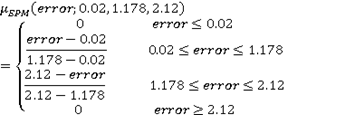
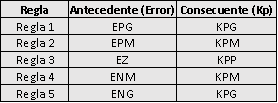
En la Figura 7 se observan las funciones de membresía utilizadas para la entrada del controlador difuso, para la ganancia Kp. Luego en la Figura 8 se tiene las funciones de membresía de salida.
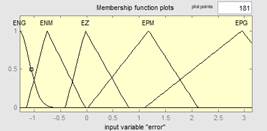
Los posibles valores del error representan al universo de discurso para la entrada del controlador de la ganancia Kp, así como los valores posibles de ganancia Kp representan al universo de discurso de la salida del controlador. Dichos universos de discurso se representan con las expresiones a continuación:


Los valores de referencia para las ganancias de los controladores fueron obtenidos mediante el criterio de Ziegler-Nichols, utilizando el método de lazo abierto.
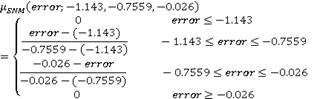
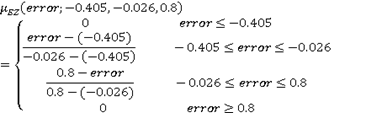
Matemáticamente, las funciones de membresía utilizadas son las siguientes:
Funciones de membresía de entrada:

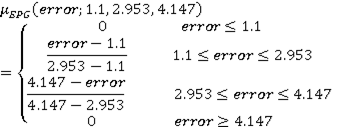
Funciones de membresía de salida:

Siendo:
ENG: error negativo grande.
ENM: error negativo medio.
EZ: error cero.
EPM: error positivo medio.
EPG: error positivo grande.
KPP: ganancia proporcional pequeña.
KPM: ganancia proporcional media.
KPG: ganancia proporcional grande.
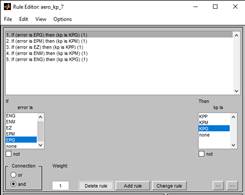
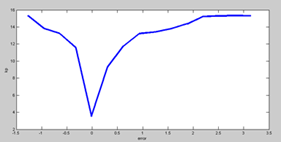
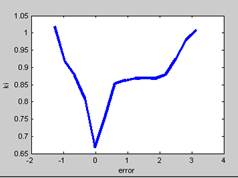
En la Tabla 1 se presentan las reglas lingüísticas establecidas, las mismas que fueron introducidas en el software Matlab (Figura 9). La curva de control del controlador está representada en la Figura 10.
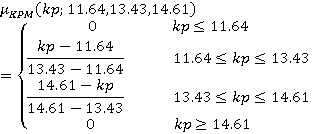
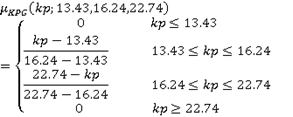
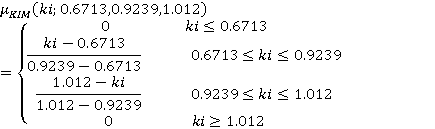
En la Figura 11 se observan las funciones de membresía utilizadas para la entrada del controlador difuso, para la ganancia Ki. Luego en la Figura 12 se tiene las funciones de membresía de salida.
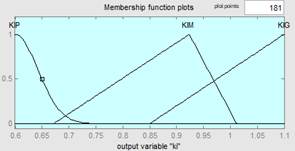
Como en el caso del controlador difuso para Kp, los posibles valores del error representan al universo de discurso para la entrada del controlador de la ganancia Ki y los valores posibles de ganancia Ki representan al universo de discurso de la salida del controlador de Ki. Dichos universos de discurso se representan con las expresiones siguientes:


Las funciones de membresía utilizadas son las siguientes:
Funciones de membresía de entrada:

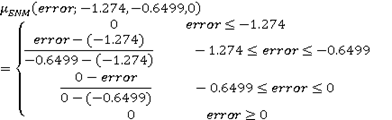
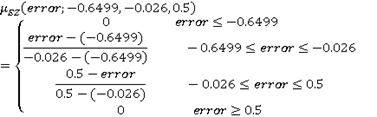

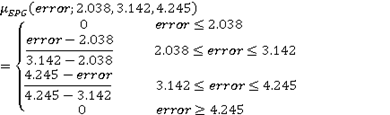
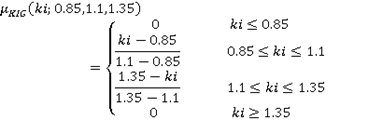
Funciones de membresía de salida:

Siendo:
ENG: error negativo grande.
ENM: error negativo medio.
EZ: error cero.
EPM: error positivo medio.
EPG: error positivo grande.
KIP: ganancia integral pequeña.
KIM: ganancia integral media.
KIG: ganancia integral grande.
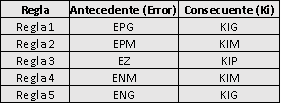
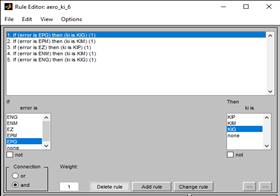
En la Tabla 2 se presentan las reglas lingüísticas aplicadas y luego introducidas en el software Matlab (Figura 13). La curva de control del controlador está representada en la Figura 14.
Ensamble del sistema: Teniendo en cuenta lo mencionado en las secciones anteriores, el ensamble de los bloques del aerogenerador junto al controlador difuso y control PI se presenta a continuación en la Figura 15.
El criterio de sintonización empleado es de Ziegler-Nichols, utilizando la aproximación de la planta a un sistema de primer orden con retardo mediante el método de Smith-Corripio aplicando un cambio de tipo escalón.
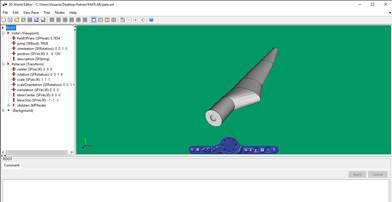
Con el fin de complementar la simulación se utilizó la herramienta 3D World Editor, disponible en el software Matlab, para la realización de un modelo en 3D del aerogenerador, además de un modelo de aspa con el objetivo de visualizar las variaciones en el ángulo β durante las pruebas. En la Figura 16 y 17 se observa la implementación de dichos modelos.

Aproximación del modelo empleado: Incluidos en los resultados de la investigación se encuentra el análisis del comportamiento de la planta en régimen transitorio, según lo mencionado por Ogata (Ogata, 2010), con frecuencia el desempeño de un sistema puede estar especificado en el comportamiento de la respuesta transitoria para una entrada de tipo escalón, ya que es fácil de generar y con comportamiento drástico. Si se conoce la respuesta ante este tipo de entrada es matemáticamente posible calcular las respuestas para otros tipos de entrada.
Al sistema se le aplicó un cambio de tipo escalón sobre el valor del ángulo β, el cambio de este parámetro implica una acción en el elemento final de control y afecta directamente a la velocidad de rotación del aerogenerador. El cambio se realizó una vez que el sistema alcanzó un estado estable, bajo una velocidad constante de viento, sin perturbaciones. El porcentaje del escalón aplicado fue del 7.08%, suficiente para tener registrado el comportamiento y fue aplicado a los 30 segundos. En la Figura 18 se observa el comportamiento del sistema y la influencia de esta acción en la velocidad de rotación.
De esta forma, los valores que son obtenidos mediante el análisis de respuesta transitoria del modelo son los siguientes:
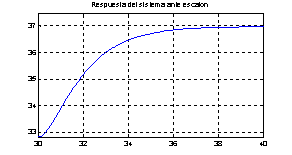
Luego de analizar los valores alcanzados, se encontró que el valor mínimo fue de 33.8245 y el valor máximo alcanzado de 36.9985. Teniendo en cuenta que el porcentaje del cambio en la entrada fue de 7.08%, el valor de K se calculó de la siguiente manera:

Para la obtención de los valores de la constante de tiempo τ y la constante de tiempo de retardo θ, se utilizó el método de Smith-Corripio. Según dicho criterio, los valores de t1 y t2 son los siguientes:


Por lo tanto, los valores de las constantes de tiempo τ y θ están definidas como se muestra a continuación junto con la función de transferencia equivalente, luego en la Figura 19 se observa el comportamiento de la aproximación en comparación al comportamiento natural de la planta.


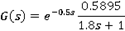
Figura 19. Comparación de la aproximación realizada con la respuesta obtenida de la planta ante el escalón.
Sintonización del controlador: El controlador implementado es de tipo adaptativo, sin embargo, el valor de las ganancias proporcional e integral parten de valores calculados mediante un criterio de sintonización, el que se utilizó fue el método a lazo abierto de Ziegler-Nichols, ya que es un método sencillo y práctico para estas aplicaciones.
Teniendo en cuenta el criterio, los valores de las ganancias proporcional e integral están dados por:
Por lo tanto, los rangos de valores o universos de discurso para los controladores difusos se representan por:


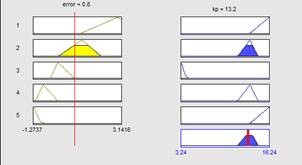
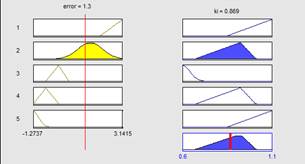
Comportamiento del controlador difuso: Como se ha mencionado ya anteriormente, el método implementado para los controladores difusos es el método de Mamdani. Para el proceso de defusificación se utilizó el método del centroide. En la Figura 20 y Figura 21 se puede observar el proceso de inferencia en Fuzzy Logic Designer del controlador difuso correspondiente a la ganancia Kp y Ki, para valores de error en la entrada de 0.8 y 1.3, respectivamente, con sus valores de salida correspondientes.
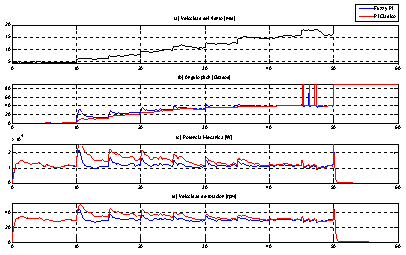
Desempeño del controlador PI difuso: A continuación, se presentan los resultados obtenidos del comportamiento del sistema ensamblado, utilizando los bloques correspondientes al aerogenerador junto con el controlador PI difuso adaptativo. Para realizar la evaluación del sistema empleado se procedió a establecer un setpoint de velocidad de rotación de π rad/s o 30 rpm. Se partió de una velocidad inicial de viento para luego ir en aumento hasta alcanzar la velocidad establecida como velocidad cut-out del aerogenerador, en donde las palas pasan a la posición de bandera, es decir a 90°, para entrar en régimen de frenado (región III de trabajo en curva PV). En la Figura 22 se puede observar el comportamiento de los distintos parámetros medidos, donde (a) representa la velocidad del viento en m/s, (b) el ángulo que toman las palas, (c) la potencia mecánica del aerogenerador y (d) la velocidad de rotación en rpm. Los resultados están comparados con un controlador Proporcional Integral clásico de ganancias estáticas.
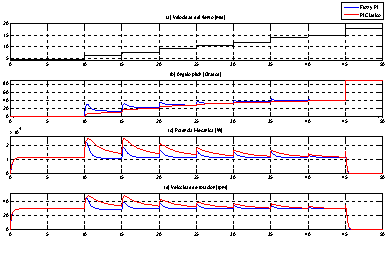
Figura 22. Comportamiento del sistema bajo la acción del controlador difuso PI. En color rojo se observa el comportamiento con un controlador PI clásico y en color azul el comportamiento con el controlador difuso PI de ganancias adaptativas diseñado.
Como se puede observar en la figura anterior, los cambios en la velocidad del viento son generados a partir de 10 segundos y se producen en un intervalo de 5 segundos entre cambios, yendo los valores en aumento. En el segundo 45 se alcanza la velocidad de viento establecida como velocidad cut-out, por lo que el aerogenerador procede a realizar un frenado. El comportamiento en comparación a un controlador PI clásico es notablemente mejor, se observa un menor tiempo de establecimiento y menor sobrepico en las respuestas.
Los valores de sobrepico en el comportamiento del sistema para el controlador PI clásico van desde el 6% en el caso del valor mínimo, hasta 66.6% para el sobrepico máximo registrado. Para el sistema implementando de controlador difuso PI, el sobrepico mínimo registrado disminuye en un 2.7% y el máximo posee una disminución considerable del 20%, quedando así comprendido entre 3.3% y 46.6%. Se observa además en la Figura 22 (c) y (d), la velocidad de rotación y la potencia mecánica, que en los primeros dos escalones de perturbación no se registran cambios en el sobrepico del controlador PI clásico, sin embargo, para el control difuso PI sí se registró una disminución ya a partir del segundo cambio.
En cuanto al tiempo de establecimiento, para el controlador PI clásico se registró un tiempo comprendido entre 6 y 12 segundos, mientras que para el controlador difuso PI dicho tiempo de establecimiento es de aproximadamente 3 segundos para todos los cambios en la velocidad del viento.
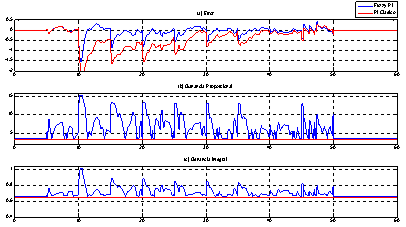
A continuación, en la Figura 23 se tiene en (a) el comportamiento del error, (b) los valores tomados por la ganancia proporcional a lo largo del tiempo, (c) los valores tomados por la ganancia integral a lo largo del tiempo.
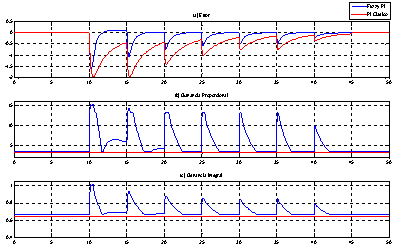
Figura 23. Comportamiento del error, la ganancia proporcional e integral utilizando el controlador diseñado (azul), en comparación con un controlador PI clásico (rojo).
Como se puede observar en la Figura anterior, los valores de ganancia parten de los valores que fueron hallados mediante el criterio de Ziegler-Nichols, variando su valor de acuerdo al comportamiento del sistema en ese momento.
Con el fin de analizar el comportamiento y rendimiento del sistema se procedió a realizar pruebas utilizando un modelo estadístico de viento conocido como Modelo de Kaimal, en el que se añaden turbulencias a una velocidad de viento media dada. El comportamiento del sistema bajo esas condiciones puede ser visto a continuación en la Figura 24 y 25. Para el control difuso PI se puede observar que su comportamiento es similar al registrado en el caso de viento constante, en cuanto al controlador PI clásico se puede observar que el comportamiento también es similar al registrado con viento constante, sin embargo en los últimos segundos se puede observar un cambio brusco en la acción de control, lo que lleva al sistema a alcanzar el valor máximo del ángulo de las palas cuando el régimen de trabajo se acerca a la velocidad cut-out, sin haber alcanzado aún dicho valor de velocidad. Este comportamiento muestra una indeseada sensibilidad a las perturbaciones realizadas para el control PI clásico, por su parte el controlador difuso PI demuestra una mayor robustez para esta situación, ya que no presenta inconvenientes cuando la velocidad del viento con perturbaciones se acerca a la velocidad cut-out del régimen de trabajo del aerogenerador.
Mediante un buen control en la generación de energía eléctrica mediante el viento, se puede optimizar en gran manera la producción y hacer cada vez más factible el uso de estas tecnologías renovables. Pudiendo no solo proveer electricidad a zonas urbanas, también a zonas rurales o sitios en general de difícil acceso para la transmisión convencional de energía eléctrica. El acceso a electricidad mejora notablemente la calidad de vida de las personas que antes no poseían el recurso o que lo poseían de forma limitada.
CONCLUSIONES
Partiendo de la observación y la recolección de información acerca de la teoría detrás de los aerogeneradores, energía eólica en general y conversión de energía, se cumplió con lo concerniente al objetivo de “Comprender el funcionamiento y los fundamentos detrás de la conversión de energía eólica a energía eléctrica”, se logró asentar los conceptos correspondientes y necesarios para llevar a cabo el proyecto.
Gracias al análisis teórico-matemático realizado y la investigación acerca de los diferentes parámetros influyentes en un sistema de aprovechamiento de energía eólica se logró cumplir con el objetivo de “Realizar el análisis a nivel teórico de las instalaciones de un aerogenerador”, de esta manera se pudo llevar a cabo la implementación de un modelo de aerogenerador en la herramienta Matlab-Simulink, mediante la implementación de las ecuaciones correspondientes en formato de diagrama de bloques. El modelo implementado es un modelo básico de un sistema de transformación de energía eólica a energía eléctrica, por lo que existen varios parámetros que están presentes en una planta física que, para fines prácticos de simulación y diseño, se ignoran en el presente diseño y desarrollo, dejando así los parámetros principales del modelo suficientes para obtener una referencia de funcionamiento para una implementación real.
En lo que respecta a “Analizar la importancia y necesidad de un control sobre la velocidad de rotación en aerogeneradores”, las principales razones encontradas luego de este análisis fueron el mejor aprovechamiento de la energía contenida en el viento a fin de optimizar la potencia mecánica obtenida y el control sobre la rotación en momentos que la velocidad del viento se aproxima a velocidades cut-out como método de protección estructural.
A continuación del diseño y ensamble de bloques del aerogenerador, se procedió al diseño del sistema de control, para el cual primeramente se realizó la aproximación del modelo a un sistema de primer orden con retardo, dicha aproximación resultó ser bastante similar a la respuesta natural del modelo, por lo que se concluye que en casos en que la respuesta obtenida del sistema sea de tipo sigmoidal (no posea sobrepicos ni oscilaciones en su respuesta natural), el método empleado presenta una buena opción para obtener una referencia de parámetros del comportamiento de la planta, útiles para criterios de sintonización de controladores.
Referente al objetivo de “Analizar conceptos teóricos sobre controladores P, PI, PID y controladores fuzzy” y “Desarrollar los análisis pertinentes con respecto al controlador PI fuzzy”, se optó por un control PI con ganancias difusas que se basó en el empleado por Al-Mola et al) (Al-Mola, Abdullah, & Muhaimin, 2013). El rendimiento fue comparado con el de un control PI clásico, que fue sintonizado mediante el criterio de Ziegler-Nichols, para el caso del control difuso PI propuesto se diseñaron con el fin de que las ganancias tengan como referencia los valores de sintonización calculados, también mediante el criterio Ziegler-Nichols al igual que el control PI clásico.
Para el objetivo de “Evaluar el funcionamiento del sistema empleado utilizando herramientas analíticas y computacionales de simulación”, se realizó las respectivas pruebas en Simulink y se pudo constatar el rendimiento y eficiencia del sistema, mostrando una buena respuesta a los cambios realizados en la velocidad del viento considerados como perturbaciones a la planta, así también obtuvo un buen desempeño en las pruebas realizadas con turbulencias en el viento, demostrando robustez.
Los valores obtenidos fueron registrados mediante la herramienta Scope disponible en Simulink y visualizados mediante la herramienta VR Sink. Con respecto al controlador difuso PI se puede considerar además que una vez obtenidos los valores de ganancias de sintonización puede no ser necesario buscar otros valores de ganancias de forma empírica y experimental, como es común hacer en caso de controles clásicos de buscar otros valores a partir de los valores calculados, ya que el controlador difuso es capaz de variar por sí solo las ganancias en función al comportamiento del sistema. En cuanto a los controladores difusos las funciones de membresía implementadas, así también las reglas lingüísticas establecidas, se consideran adecuadas para el caso, ambas pueden mejorarse, ya que para este tipo de controladores no existen criterios de sintonización ni diseño, únicamente depende del diseñador, por lo que la respuesta y el comportamiento siempre están sujetos a mejoras a medida que se tenga más conocimiento de la planta y se realicen modelos más aproximados a las plantas físicas, ya que se precisa de un buen conocimiento de la dinámica de la planta para posteriormente realizar un buen diseño de reglas y funciones de pertenencia, un controlador difuso puede registrar un comportamiento bastante aceptable siempre y cuando su diseño sea bueno.
En términos generales, luego de la realización de pruebas y registro de datos, como opinión personal se puede concluir que el comportamiento general, es decir el tiempo de asentamiento, así como los valores de sobrepico obtenidos con el método de control empleado, cumplen con el objetivo general propuesto, registran además una mejor respuesta que un control PI clásico sintonizado por el mismo método, dicho comportamiento también se presenta en otras investigaciones sobre controladores difusos PI y PID, como las realizadas por Marín et al (Marín Anzurez, Ramírez Zavala, & Torres García, 2018) y por Cerecero et al (Cerecero Natale, Ramos Fernandez, Marquez Vera, & Campos Mercado, 2016), así también es respaldada por la información recogida y detallada en el Capítulo II. Se resalta además el comportamiento del controlador en cuanto la velocidad del viento alcanza o sobrepasa la velocidad cut-out, llevando en esta instancia al aerogenerador a régimen de parada o frenado de emergencia y cumpliendo con el objetivo de proteger a las instalaciones. De esta forma y posterior a análisis realizado con respecto a los resultados obtenidos se concluye que el sistema propuesto cumple con el objetivo general y específicos de la investigación.

